Tral Patrol 4.0






Specification
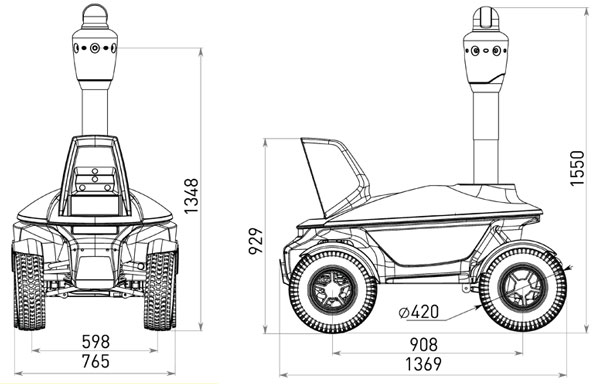
| Height | 1550 mm |
| Width | 765 mm |
| Thickness | 1369 mm |
| Weight | 120 kg |
| Case | Metal |
| Modifications | In stock in | Qty | Buy | |
| USA | Russia | |||
Select modifications
Computer Vision Network comprises of three video devices:
The first system includes Stereo Vision Camera that detects obstacles and allows the robot to correct the course. Stereo Vision Camera creates real time 3D disparity map, which builds a dynamic 3D environment at a distance of a several meters ahead of the vehicle.
The second system consists of single road detection camera that provides the exact path image for the autopilot and keeps the robot on the route.
The third system provides autonomous off-road navigation by using computer vision. It’s based on the visual odometer system for Simultaneous Localization and Mapping – SLAM.
Artificial Intelligence
The most important element of our system is its AI-enhanced software, at the heart of which is the Multi-Agent System (MAS). Each robot uses set of sensors to receive information about the environment. By processing the data coming from all these sensors, the traffic control system solves the problem of building a motion pathway. The primary source of data for successful motion pathway solution is a vision system capable of creating a map of alternative pathways. The vision system corrects and improves the map with every repeated passage. In the event of obstacles, the system detours and thus explores the surrounding area. Thus, the GPS navigation system becomes secondary in choosing a route.
Multi-Agent System
Upon encountering obstacles along the way, the system automatically decides on the detour path selecting from a variety of possible ways. Naturally, every obstacle checked is this intruder or not. In the multi-agent system, all participating agents (robots and base servers) may access the information circulating in the system. Once one agent knows the information, it becomes available to every agent within the system. In fact, the ability of sharing information and executing group tasks is exactly what makes a group of our robots a Multi-Agent System. For easy visual perception, please watch the video.
Intruder Detection
The most exciting things happen when robot detects an intruder. We call this behavior the Swarm Intelligence. Upon detection of an intruder the robot stops moving along its designated route and switches to the optimal path to the intruder
Mobile Video Surveillance
Operator can remotely control operation of several robots from a tablet PC. Software application Robot Vision displays: current location of robot indicated on site / facility map, images from video cameras, management systems status and battery charge indicator. If circumstances require, it is possible to remotely adjust the route of robot's movement.
Video picture and data are transmitted via WiFi. Video taken by all cameras in the course of all patrolling is saved. During robot's recharging video data can be copied to external hard drive or to NAS (Network Attached Storage).
|
Quantity of all-round surveillance cameras |
6 |
|
Height of turning camera above the ground surface |
1500 mm |
|
Taking angle of all-round surveillance cameras |
70 degrees |
|
Optical zoom of guided camera |
20x |
|
Guided camera focusing speed |
120 degrees / sec. |
|
Cameras resolution |
704х576 |
|
Video archive record format |
.msn, H.264 or M-JPEG compression. |
|
Wireless network WiFi |
802.11 b/g/n 2,4 GHz 20/40MHz band, WPA2-PSK protection |
Driving Along the Route without Operator Guidance
A wheeled robot moves between observation positions under control of automatic driving system without operator guidance. The route for driving is set during the first robot's run, guided by the operator.
The system of video driving allows robot to successfully drive along the route under conditions of unstable reception of satellite navigation system signals, for example, in forest parks or in radio shadow near building systems. Driving in the automatic mode the robot recognizes obstacles and drives around them. When accumulator batteries run low or become too cooled, the robot automatically drives back for recharging.
|
Operating range at +5°С |
25 km |
|
Driving speed in the automatic mode in the day time |
4-9 km/hr |
|
Driving speed in the automatic mode at night |
3-6 km/hr |
|
Optimal width of driving path |
1.2 m |
|
Minimum turning radius |
3.4 m, outer |
|
Maximum gradeability |
18° |
|
Height of stair step the robot can overcome |
14 cm |
|
Fording depth |
up to 12 cm |
Year-Round and Day-and-Night Operation
The robot can surely drive on any type of hard coating. It has enough off-road capacity to overcome small puddles and natural soil paths. In winter the robot's route shall be regularly cleared from snow. Amount of fallen snow not preventing the robot from moving along the route corresponds to the typical mean one-day snowfall in the midland of Russia.
At night the robot can drive along the areas with street lighting, organized according to appropriate SNiPs (construction norms and regulations) for: pedestrian streets, sanatoriums, car parking lots, storehouses and public utilities zones. Driving at night the robot switches on lower beam LED headlamps.
|
Drive |
rear, differential |
|
Drive electric power |
500W at 24V |
|
Nominal range of operational temperatures |
-20°C...+45°C |
|
Extreme range of operational temperatures |
-35°C...+55°C |
|
Depth of snow cover |
up to 5 cm of fresh snow |
|
Average illumination of the territory at night |
at least 6 lx |
| Height | 1550 mm |
| Width | 765 mm |
| Thickness | 1369 mm |
| Weight | 120 kg |
| Case | Metal |
| Motion detector | YES |
| Operation time | 12 hours (time of autonomous patrolling ) |
| Battery charging time | 4 hours |
Delivery set:
Please note: software upgrade can cause recorder’s breakdown. This is not a warranty case. All the new recorders have the latest software version and there is no necessity to upgrade software after buying the recorder. Don’t take the risk. In case there are problems with audio recorder operation please apply to our technical support specialist: support@ts-market.com
| Software | Firmware | Manual to software |
Series manual | Supplement to the model |
| Security Robot Brief Description General information. Patrolling territories Robot stereo vision. How does it work Robot motion software Artificial Intelligence in the group behavior of robots Software of multi-agent system Presentation Brochure |